再仕分けが重要なリサイクルゴミ
資源ゴミは、リサイクルが可能です。
しかし、素材によってリサイクルに必要な工程や機械が異なることから、持ち込まれたリサイクルゴミをビン・缶・ペットボトルのように再仕分けする必要があります。
多くのクリーンセンター(ゴミ処理施設)では、ベルトコンベアに乗って流れてくるゴミを人が目視で仕分けします。

汚れがひどいものや、ペットボトルにラベルがついたままのものなどはリサイクルすることができず、それらも目視で取り除かれます。
日々大量に回収されるゴミを人力で仕分けするには沢山の人が必要ですが、この仕分け作業を一部でも自動化すれば、業界の人材不足緩和が期待できます。
また、「リサイクルできるのに普通に捨てられてしまったゴミ」というのも、ゴミの中からリサイクルゴミだけを回収し、捨てずにリサイクルすることも可能になるでしょう。
AIが解決できること
ベルトコンベアに乗ったリサイクルゴミをカメラで撮影し、その映像をAIで判定することにより、ビン・缶・ペットボトルのどれに分類されるかを判断することが可能です。また、材質の色別分類なども同様に実現可能です。
一口にビンや缶といっても、様々な色、形のものがあります。持ち込まれる過程で一部が割れたり、汚れが付着している場合もあるでしょう。実は、こうした「一つ一つ細かな違いはあるけれど、だいたいこういうものがビン」のように曖昧さのある識別にAIは効果的です。
また、汚れの度合を判定し、汚れが多いものはリサイクル資源から省くことも可能です。
もちろん、見た目ではビンか缶か分かりづらく、重さや硬さで判断が必要なケースもありますが、
必要に応じてカメラ映像だけでなく重量計や弾性係数センサーを併用することで精度向上が見込めます。
以下は弊社でAIによる画像認識を利用して「黒いガラス瓶」「ガラス瓶」「カン」「ペットボトル」をAIで識別した実証実験の一例です。
実証実験
学習には、それぞれネットで集めたデータを使用し、全部で4種類にわけ学習を行いました。
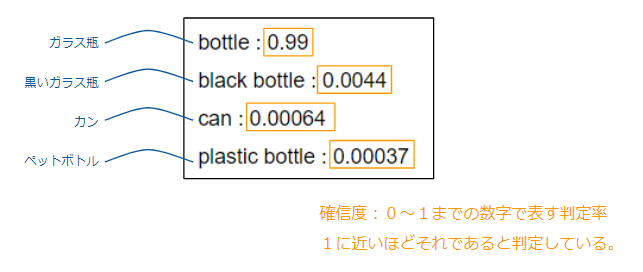
<判定結果の表示形式について>
<使用した学習データ枚数>
- black bottle(黒いガラス瓶):510枚
- bottle(ガラス瓶):412枚
- can(カン):276枚
- plastic bottle(ペットボトル):331枚

<識別結果>
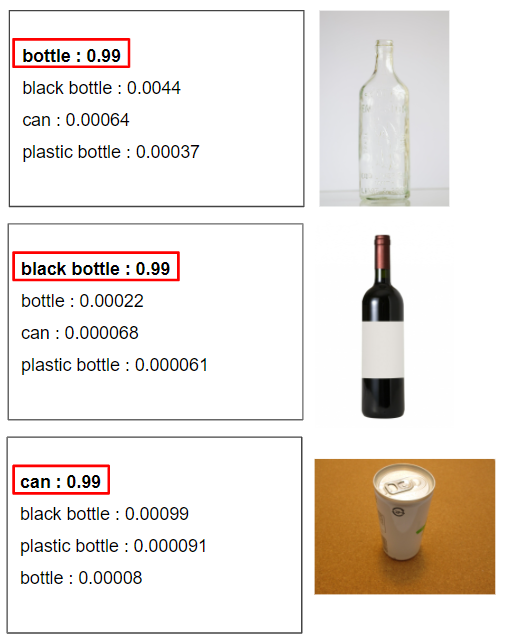
各種類、確信度が90%以上と高く、きちんと識別できていることがわかります。
このように、仕分けしたい種類に分けてデータを用意するだけで、それぞれを正しく識別することができるのです。
分別システムの活用例
今回の実証実験では簡易的にたくさんのデータを集めるため、綺麗な状態のものを学習しましたが、実際に収集するリサイクルゴミは潰れたペットボトルやカン、割れた瓶、汚れの多いプラスチックなど、形状も少し異なるものが多いと思います。
そのため、学習に使用するデータは、実際に収集してきたリサイクルゴミを撮影する必要があります。
仕分けを自動化するには、仕分けする人の代わりになるロボットや枝分かれするベルトコンベアなどのハードウェアも必要です。
こちらの映像は、スペインでSadako Technologiesという企業がAIを使ったゴミの分別ロボットを開発したものです。
※この動画は他社事例です。弊社が作成したものではございません。
ベルトコンベアから流れてくるゴミをAIで判定し、ロボットのアームで種類ごとに仕分けしているのがわかります。
まとめ
実証実験では色のついた黒いボトル、透明なボトル、カン、ペットボトルを識別し判定をおここなった結果それぞれの形や色の特徴から高い数値での判定が可能でした。
自動化を実現するためには、実際に収集したリサイクルゴミを使用して学習する必要があります。
ロボットのハードウェアと組み合わせることで仕分け作業を自動化し、人手不足の解決が期待できるといえます。
また、AIを活用し最初から100%の自動化を目指すのではなく、判別が難しいものは「再検査」に振り分けさせ一部を人間が確認するなど省人化から始めることで、コストを最小化しながら早期に効果を実感できます。
追記:実証実験の実施
大阪府箕面市立リサイクルセンターの業務フローを参考に、対象のリサイクルゴミ(かん・びんの分別処理)を参考に、AIを用いたベルトコンベアに流れるリサイクルゴミの検出及び自動分別の実験を行いました。
参考とした対象業務に関して、実際にAIモデルの構築を行い、構築したAIにてベルトコンベアを流れるリサイクルゴミ(かん・びんの分別処理)の分別の可能性に関する実証実験を行いました。
詳細は以下記事を参照下さい。